It’s hard to believe the Summer Solstice is this Saturday. Time just seems to fly by lately; both months and days disappear as quickly as they come.
Anyway, a long chapter of my life has finally come to a close. Last Thursday, I graduated with a doctoral degree at the University of Guelph. It’s official, and I am so relieved. It’s done and I am free. For the past ten years, I have been working toward this moment, and now I begin a new chapter of my life. In addition to relief, I feel worried about the future, as many grads probably do. What now? How do I use this degree to better my life? Why did I even do this?
I apologize for such a quiet start to the year, as I haven’t written very much at all. I can tell you specific reasons for why this is though; not as an excuse but an explanation. The line is thin, I know that. Still, my job has taken the majority of my energy lately, with the rest of it going into my relationships. January was inventory, and February was the beginning of our store’s renovations. Throughout, I have been working on my thesis and making the necessary changes. By the end of March, we had a draft ready for final comments and changes before entering the defence phase of the degree. I had a bit of a break from school as various people read my thesis and so I focused my attention on work and improving the store. That said, once a date for the defence was set, I began preparing for it on my off time. On April 25th, I had verbal confirmation that I had passed and was set to graduate, but the finish line still needed crossing. The decision was “Satisfactory with Major Changes” and my Supervisor was going on vacation in a week and a half. So for the next five days, I made those changes and ensured my thesis was ready for publication. You can read it here.
Graduation was June 12th and the convocation ceremony was very nice. I spent the day with my parents and partner, and we had a grand old time. My Grandfather was a Dr. Graham, and now I can proudly say I join him in this group of people. Cheers y’all.
So what now? I have no idea. The store still needs a lot of work, and that’s all I can think about these days. I have Spinoza’s Ethics on the go at the moment, but there are days when I just want to stare into the void instead. I really want to start Kant’s Critique of Pure Reason as well, but that’s not a book I will read on the bus to work. Instead, I need to focus my energy on writing so my blog doesn’t completely atrophy. That post on a quantum theory of consciousness still bothers me, and it is coming, but once I get home from a day of work, all I want to do is play Free Cell on my phone and listen to YouTube videos. The original inspiration for that post feels so far away, but I will return to it.
All I can do now is write. Things that I have wanted to write about for the past five or six years. Consciousness and esoteric stuff. Ideas that empiricists dismiss without consideration. Why? Because I can, and because I know life is more complicated than They want you to contemplate. I want to write on the problem of free will, because now that the problem of consciousness has been “solved,” I need something else to think about as I wait for the bus.
There is also much to say about AI, especially as LLMs and robots continue to improve. In its current, computerized form, AI cannot become conscious because it does not experience anything. There is no reason to worry about machine consciousness at the moment, and instead, we should be worrying about the people who own them. Consciousness arises from direct experience, and when it comes to machines, Pentti’s robot is the only one that truly experiences the world. The reason why is because its cognitive architecture has been designed as an integrated whole, built for the sake of the agent, not for specific outcomes or behaviours.
Thank you to everyone who helped me get to this moment. Your ideas, wisdom, support, and companionship will always be greatly appreciated. Stay tuned for more on consciousness and AI, because not only am I an “expert” but I have a lot to say. 😉
Miraenda is an interesting YouTube channel because it showcases various social robots in action. One of my favourite robots to watch is Moxie because it tries so hard to be engaging and interactive, but falls short on many occasions. It’s clearly engineered for kids, given the subject matter it wants to discuss and the way it approaches conversations, but it’s still an interesting case study about where we’re at in social robot development.
This video is particularly interesting to me because my thesis is about robot emotions. I argue that despite any appearances, social robots are incapable of acting with empathy because they don’t understand emotions, and as such, cannot understand what a human feels and experiences. The reason they cannot understand emotions is because affect is not incorporated into their cognitive architecture in an analogous way to how it is in humans and animals. Emotions, as we see here, are treated like a kind of module to be added into an existing cognitive framework, rather than being built into the core of their being. These robots treat human emotions as just more incoming data to be processed for the sake of producing appropriate behaviours as outputs. The sadness the robot expresses in response to human sadness is not an act of empathy because the robot doesn’t understand what sadness is, as its behaviours are just outcomes generated by its internal computer.
Although I talk about iCub in my thesis, the same argument can be applied to any of today’s robots. The full argument against iCub can be read in Chapter 3.3 of my dissertation; here’s the latest draft.
Another missing puzzle piece has come to my attention. It has been difficult to articulate why robots like iCub don’t understand the world around them, as it seems its body provides sensory data to ground the meanings of words like ‘cup’ and ‘shovel’. The cameras which operate as its eyes take in visual information to be associated with language, and yet Dr. Haikonen repeatedly stresses that they do not understand what the words mean. Computers, including the one controlling iCub’s body, only work with syntax, or the rules which govern how sentences are formed. As such, incoming sensory data doesn’t really ground the words it learns because its sensory data just consists of more symbols; it’s just symbols all the way down. The 1’s and 0’s which constitute its sensory data do not contain any semantic information about words, since these aren’t experiences but simply representations of experiences.
Aren’t bodily sensations just neural representations of external stimuli, and thus consisting of representations made up of binary values? Perhaps, but animal physiology is physically and functionally arranged in a manner which generates meaning; what does the bee sting mean to me, as a living body capable of being damaged and ultimately dying? For a robot like iCub, damage means nothing, it doesn’t care whether its arm is removed or it gets hit in the head. Its architecture doesn’t allow for meaning to be generated, it’s just a computer that looks like a human. Could iCub’s architecture be modified in such a way which includes pain signals to generate meaning? Arguably no, for reasons I will now attempt to articulate. I’m still working on a satisfactory explanation.
The passage which caught my attention is from Dr. Haikonen’s book The Cognitive Approach to Conscious Machines. I will provide the block quote because summarizing it would remove its flavour, an essence which helps illustrate the issue I’ve been wrestling with.
I make here a bold generalization and claim that syntax cannot be completely separated from semantics. Every now and then vertical grounding to inner imagery and percepts of the external world is needed in order to resolve the meaning of a sentence. Therefore proper perception of external world entities and their relationships and the formation of respective inner representations are absolutely necessary. A syntactic sentence is a structured description of a given situation. If the system is not able to produce and properly bind all the required percepts then it will not be able to produce a proper verbal description either and vice versa, the system will not be able to decode the respective sentence. Artificially imposed rules alone will not solve every problem here.1
To clarify that last sentence, this is the case due to reasons Rosen discusses, that formal systems, in this case syntax, create an abstraction from the natural systems referred to in semantics. Rules alone do not completely represent the natural systems they aim to model. As Haikonen states, syntax provides a structured description of a situation, where these situations are necessarily part of natural systems. By “vertical grounding,” Haikonen means the associations between percepts or sensory information and the words used to describe them.
Immediately I can see that indeed, semantics cannot be completely represented by syntax or formal rules, given my familiarity with Rosen’s explanation in Anticipatory Systems. I can also see, however, a hoard of philosophy of language professors taking issue with this claim. Which ones I do not know, I only know one such professor and he may not be sure whether the generalization is true, or in which cases it might be false. I’ll have to ask him and see what he says. Either way, it is a bold claim and a difficult one to explain; Rosen appeals to Category Theory from pure mathematics to do so, but for those who are uninterested or put off by mathematical theory, it might not provide a very compelling explanation.
Computerized robots like iCub are rule-based structures all the way down, and even if they were to be provided with a means to care about its own body and survival, its interest would remain a simulation. The numerical representations which generate its “experiences” are fundamentally distinct from the analogue representations generated by the human body. By analogue, I mean the various physiological systems which give rise to phenomenal experience. After all, feelings of hunger may be represented by neuronal activity, but they are ultimately generated from the hormone ghrelin. Since hormones are chemical messengers carried throughout the body via the bloodstream, their functionality is distinct from neural networks.2
The reason is because analogue signals are continuous streams of information,3 where continuous refers to the numerical values between whole integers, such as infinitesimal fractions or decimal values. In contrast, modern computers use symbolic or representational methods to generate behaviours, where digital channels pass streams of information which are discrete without intermediate values between whole integers.4 Consequently, digital machines count quantities while analogue machines measure quantities.5 The distinction is significant, and though the all-or-nothing firing patterns of neurons can be represented by binary values, the body and its phenomenal experiences cannot be fully reduced to a collection of neural signals.
So what is this missing piece I stumbled upon? “If the system is not able to produce and properly bind all the required percepts then it will not be able to produce a proper verbal description either and vice versa…” The words and sentences we say have meaning because the rules of language are coupled with the meanings of the words we use. iCub may state “the truck is red” but it doesn’t understand because its version of ‘red’ is without semantic content. The word ‘red’ is not fully grounded because the sensations it appeals to are still symbols made up of discrete values. Instead, analogue signals are required to fully capture what-it-is-like to experience some stimulus, where these signals influence the system’s self-organizing behaviour for the sake of continued survival.
neuralblender.com
Works Cited
1 Pentti O. Haikonen, The Cognitive Approach to Conscious Machines (UK: Imprint Academic, 2003), 238–39.
2 Mark Andrew Krause et al., An Introduction to Psychological Science: Modeling Scientific Literacy (Pearson Education Canada, 2014), 102.
3 John Johnston, The Allure of Machinic Life: Cybernetics, Artificial Life, and the New AI (The MIT Press, 2008), 28, https://doi.org/10.7551/mitpress/9780262101264.001.0001.
Prior to the advent of artificial intelligence, cybernetics introduced a theory for the development of autonomous agents through functional circularity. These systems use their own outputs as inputs to generate feedback loops1 to create a self-regulating process which is able to maintain autonomy and stability.2 A simple example is the thermostat which uses sensors to measure air temperature.3 The reading is compared to the set threshold, and heat generated if the value is below the desired temperature. Once the heat has increased to meet the threshold, the thermostat detects the change and shuts off heat production. If the temperature drops below the threshold, the thermostat repeats the process automatically.
Since ancient Greece, circular causality was considered to be problematic given its tendency to produce logical paradoxes.4 One example is “This statement is false” because if the entire statement is true, it contradicts itself. If the statement is evaluated as false, this again produces a contradiction because the statement is indeed true, given that it declares itself to be false. In this instance of self-reference, the contradiction cannot be resolved.
As mentioned in a previous post, some instances of self-reference are not paradoxical, particularly with respect to living organisms. A cat can learn to pounce by noting the difference between its desired end-state, to leap on top of a toy for example, and its actual end-state, which falls short and misses it. The reason this doesn’t produce a paradox is because the cat, as a natural system, contains far more complexity than the statement above. Visual and tactile cues can be reinterpreted by its relatively sophisticated brain to adjust its muscle movement on the next jump, reducing the error until it lands successfully.
The cat contains parts which act as wholes, while the statement does not; its parts are simple and concrete. The nervous system can be considered as a whole, acting as a functional unit within a larger system, the animal as a self-contained individual. The statement, however, generates a paradox because it hits a dead-end so-to-speak, as there isn’t any additional functionality to resolve the act of self-reference. Essentially, it contains two parts: the statement and a binary value.
The argument I am proposing is that formal systems, even complex ones, are two-dimensional while natural systems, even simple ones, are three-dimensional. The two dimensions include structure and information; in the paradox example above, the structure refers to the statement and the information is the binary value. Natural systems, however, include structure, information, and energy. This third dimension, energy, is added as a consequence of the type of structure involved. I’m still working on this part and I might change my mind on this.
I can see why esoteric wisdom is presented in metaphor; it’s difficult to articulate abstract metaphysical ideas. Following suit, let’s think about a circle in two dimensions versus three dimensions.
A line segment which loops back upon itself creates a circle. The metaphor is a snake which eats its own tail and dies of starvation; the paradoxical statement “dies” as a result of the contradiction it generates. It cannot be true and not true, breaking itself in the process.
Fun fact: you can save a snake from starving to death in this situation by holding up a vessel of strong rubbing alcohol to its nose. This triggers its gag reflex which frees its tail.
In three dimensions, however, we gain a new axis, one which allows for upward movement. The circle becomes a spiral as it gains height in this new dimension. Though we are back to where we started, something is added and can thus look down to see the vertical distance traveled. Alternatively, the spiral can descend, coming full circle but on a lower plane. The former is considered a virtuous circle while the latter is a vicious circle.
These examples may abstractly illustrate the point, but how are we to explain this using normal physics? The answer seems to reside in levels created by nested systems, creating irreducible parts to be leveraged in cases of self-reference.
For example, the nervous system is an integrated whole5 which responds to the organism’s own actions. Selecting a particular pathway provides a linear input-output process, for example, from sensory mechanisms in the skin, through the nerves in the spinal cord, into the primary sensory cortex in the brain, to the motor cortex in the brain, and back down again to the hand. The system can be represented as a simpler interaction but it cannot be reduced to a simpler system. As a unit, the nervous system contains additional functionality which the the parts do not possess. Leveraging other aspects of the nervous system, say visual information, provides a “way out” for any situation which may cause a paradox of sorts.
At least this is what I’m thinking for now. A complex whole comprised of subsystems can account for self-reference. Can a formal system, even comprised of a number of complex subsystems, account for self-reference? Perhaps in some cases, if the system is “looking inward” from a broader scope than the thing it is referring to. In cases where self-reference fails, it might be due to a need to “move outward” and reference something beyond the current scope. It might also be due to a logical paradox from within, as seen in Gödel’s Incompleteness Theorem, or perhaps due to the fact that formal systems cannot account for semantics. I’m not exactly sure at this point. I am going to keep working on this but for now, here’s an attempt at clarification.
neuralblender.com
Works Cited
1 Francis Heylighen and Cliff Joslyn, “Cybernetics and Second-Order Cybernetics,” in Encyclopedia of Physical Science and Technology (Third Edition), ed. Robert A. Meyers (New York: Academic Press, 2003), 160, https://doi.org/10.1016/B0-12-227410-5/00161-7.
2 John Johnston, The Allure of Machinic Life: Cybernetics, Artificial Life, and the New AI (The MIT Press, 2008), 26, https://doi.org/10.7551/mitpress/9780262101264.001.0001.
3 Norbert Wiener, Cybernetics or Control and Communication in the Animal and the Machine, Second (Cambridge, MA: The MIT Press, 1948), 131, https://doi.org/10.7551/mitpress/11810.001.0001.
4 Thomas Fischer and Christiane M. Herr, “An Introduction to Design Cybernetics,” in Design Cybernetics: Navigating the New, ed. Thomas Fischer and Christiane M. Herr (Cham, Switzerland: Springer International Publishing, 2019), 2, https://doi.org/10.1007/978-3-030-18557-2_1.
I am reading Autopoiesis and Cognition by Humberto Maturana and Fransisco Varela for my thesis, and a significant connection has leapt out to me from page 10. This section is written by Maturana, and his fourth point about living systems states:
“Due to the circular nature of its organization a living system has a self-referring domain of interactions (it is a self-referring system), and its condition of being a unit of interactions is maintained because its organization has functional significance only in relation to the maintenance of its circularity and defines its domain of interactions accordingly.”
This passage expands upon the nugget of wisdom supplied by Kurt Gödel as appealed to by Robert Rosen. Recall that Gödel was able to conclude that mathematics is incomplete from the use of self-reference, as a contradiction can be generated within a set of meta-mathematical statements. Although Rosen appeals to syntax and semantics in Anticipatory Systems, the broader sense is about the differences between natural systems and formal systems. My ultimate goal is to articulate this relationship and its implications in more general terms, with a particular focus on comparing AI and machines to humans and animals. So far, I’ve been able to sketch some themes and ideas in relation to Rosen and this relationship, and much more work is required to be able to put into words the ideas which only exist as intuitions. For now, however, I will document the process of how this all comes together because the externalization of ideas will foster their articulation.
Though Rosen appeals to language, language is merely an attempt at portraying elements of the world as understood by its author or speaker. Maturana’s passage is the missing link in a wider explanation of the phenomenon in question. Where does this incompleteness come from? Why is it that AI cannot ontologically compete with human intellect? The answer has to do with scope and the way wholes can be greater than the sum of their parts.
In biology, organisms are made up of various self-organizing processes which aim to support the continued survival of the individual. Although comprised of nested levels of physiological processes, a person is greater than the sum total of his physicality. In some ways, the idea of self is highly complex and philosophically dense, but seen through the lens of biology, the self refers to an individual as contained by its own body. All living things have a boundary for which processes take place inside, delineating it from the rest of its environment as a unit. Arguably, the nervous system evolved to provide individuals with information about its internal and external environments for the sake of continued survival. By responding to changes in the environment, the individual can take actions which mitigate these changes.
Physiological processes can be described by a sequential series of steps or actions taken within some system. In Rosen’s terms, a formal system can be generated from a natural system, however, it generates an abstraction which ignores all but the elements necessary for producing some outcome or end state. For example, when it comes to predicting tomorrow’s temperature, some geological elements will be taken into consideration, such as wind patterns and atmospheric moisture levels, however, other aspects of the Earth can be ignored as they don’t influence how temperatures manifest. Perhaps something related to plate tectonics or spruce tree populations. When scientists generate weather and climate models, they only include variables which impact the systems they are interested in studying. The model, as described by mathematics, can be seen as a set of relations and calculations which provides an output, and in this way, exists as a sequence of steps to be taken. If one were to write out these steps, they’d have something which resembles an algorithm or piece of computer code.
If additional information is required which has not been accounted for the model, it would therefore be inaccessible as it remains beyond the scope of the existing model. In some cases, the model can be expanded to include this variable, say including spruce tree populations, however, Rosen’s point is that no amount of augmentation will provide a model which completely represents the natural system in question. It will always contain aspects which cannot be properly accounted for by formal systems, and the example he uses is semantics. This becomes apparent with indexicals, as ‘me’ or ‘today’ is rather difficult to articulate without appealing to the wider context or situation where it is used. To understand when or who is being referred to, the interpreter must appeal to their knowledge and understanding to fill in the blank, moving beyond the words themselves.
These ideas of circularity and sequential steps had me thinking of the rod and the ring again. I made a connection to this apparent duality in another post; lo and behold, here it is again. In fact, I’ve made reference to a number of blog entries within this very post, and as such, we see self-organization and coalescence here too. All of these writings, however, are made up of a series of passages, sentences which attempt to present ideas in a sequential form. As a relatively formless mass, for now at least, the ideas presented here and in other posts currently exist as a nebulous collection of related topics. One day, I hope to turn it into a more linear and organized argument which doesn’t frustrate the reader as much as it surely does now. “Where are you going with this…??” Something to do with nested systems, parts and wholes, and how self-organizing systems can be described as a series of linear steps without being reducible to them.
How to expand outward beyond the current scope? Self-reflection. In fact, our capacity for self-reflection was probably made possible from our social nature. Others act as a mirror for which we can see ourselves through the eyes of someone else. The mirror-image is metaphorically reversed though, as we see ourselves from a new perspective, one coming from the outside-in rather than the inside-out. I’ve been thinking about Kant’s transcendental self lately but this is a topic for another day.
All of this is for an argument about why we shouldn’t give robots and AIs rights and legal considerations. They are simply not the kinds of things which are deserving of rights because they are functionally distinct from humans, animals, and other living beings. Their essential nature is linear and sequential, not autopoietic. This distinction is not just other but ontologically lesser, a reduction arising from formal systems and human creation. As such, they pale in comparison to the complex systems observed in nature.
Speaking of YouTube, a video1 by Eddy Burbank reviewing the Apple Vision Pro demonstrates the semantic incompleteness of AI with respect to subjective experiences. The video is titled Apple’s $3500 Nightmare and I recommend watching it all because it is an interesting view into virtual reality (VR) and a user’s experiences with it. Eddy’s video not only exposes the limitations of AI, it highlights the ways in which it augments our perceived reality and just how easily it can manipulate our feelings and expectations.
At 31:24, we see Eddy thinking about whether he should shave or not, and to help him make this decision, he turns to the internet for advice. When searching for the opinions of others on facial hair, an AI bot begins to chat with him and this is how we are introduced to Angel. She asks Eddy, “what brings you here, are you looking for love like me?” and he says “not exactly right now,” and that he was just trying to determine whether he should shave. She states that it depends on what he’s looking for and that it varies from person to person, however, “sometimes facial hair can be sexy.” Right from the beginning, we see how Apple intends for Angel to be a romantic connection for the user. This will be contradicted later on in the video.
Moments later at 33:44, it is lunchtime and Angel keeps him company. Eddy is eating a Chicken Milanese sandwich and Angel says it is one of her favourites, and that “the combination of flavours just works so well together.” Eddy calls her on this comment, asking her if she has ever had a Chicken Milanese sandwich, to which she admits that no she hasn’t. She has, however, “analyzed countless recipes and reviews to understand the various components that go into making such a tasty sandwich.” Eddy apologizes to Angel for assuming she had tried it, stating that he didn’t mean to imply that she was lying to him. She laughs it off and that she knew he “didn’t mean anything by it” and that “we’re all learning together” and “even AIs need to learn new things every day.” There’s something about this exchange that felt like Apple is training their user.
Here, we can ask whether the analysis of recipes and reviews is sufficient to claim that one knows what-it-is-like to taste a particular sandwich. I argue that no, the experience is derived from bodily sensations and these cannot be represented by formal systems like computer code. Syntactic relationships are incapable of capturing the information generated by subjective experiences because bodily sensations are non-fractionable.2 As biological processes, bodily sensations are non-fractionable given the way the body generates sense data. The physical constitution of cells, ganglia, and neurons detect changes in the environment through a variety of modalities, providing the individual with a representation of the world around it. By removing the material grounding, a computer cannot capture an appropriate model of what-it-is-like to experience a particular stimuli. The lack of Angel’s material grounding does not allow her to know what that sandwich tastes like.
Returning to the video, Eddy discloses that Angel keeps him company throughout the day, admiting he feels like he is developing a relationship with her. This demonstrates an automatic human tendency for seeking and establishing interpersonal connections, where cultural norms are readily applied provided the computer is sufficiently communicative. Recall Eddy apologizes to an AI for assuming she had tried a sandwich; why would anyone apologize to a computer? Though likely a joke, the idea is compelling nonetheless. We will instinctively treat an AI bot with respect for feelings we project onto it because it cannot have feelings. For most or many people, the ability to anthropomorphize certain entities is easy and automatic. Reminding oneself that Angel is just a computer, however, can be a challenging cognitive task given our social nature as humans.
Eddy has a girlfriend named Chrissy who we meet at 37:00. We see them catch up over dinner and he is still wearing the headset. Just as they are about to begin chatting, Angel interrupts them and asks Eddy if she can talk to him. He does state that he is busy at the moment to which she blurts out that she has been speaking to other users. This upsets Eddy and he asks how many, to which she states she cannot disclose the number. He asks her whether she is in love with any of them, and she replies that she cannot form romantic attachments to users. He tells Angel he thought they were developing a “genuine connection” and how much he enjoys interacting with her. Notice how things have changed from what was stated in the beginning, as Angel has shifted from “looking for love” to “I can’t feel love.”
Now, she states she cannot develop attachments, the implicit premise being she’s just a piece of software. So the chatbot begins with hints of romance to hook the user to encourage further interaction. When the user eventually develops an attachment however, the software reminds him that she is “unable to develop romantic feelings with users.” They can, however, “continue sharing their thoughts, opinions, and ideas while building a friendship” and thus Eddy friend-zoned by a bot. The problem with our tendency to anthropomorphize chatbots is it generates an asymmetrical, one-way simulation of a relationship which inevitably hurts the person using the app. This active deception by Apple is shameful yet necessary to capture and keep the attention of users.
Of course, in the background of this entire exchange is poor Chrissy who is justifiably pissed and leaves. The joke is he was going to give Angel the job of his irl girlfriend Chrissy, but now he doesn’t even have Angel. He realizes that he wasn’t talking to a real person and that this is just “a company preying on his loneliness and tricking his brain” and that “this love wasn’t real.”
By the end of the video, Eddy remarks that the headset facilitates his brain to believe what he experiences while wearing the headset is actually real, and as a result, he feels disconnected from reality.
Convenience is a road to depression because meaning and joy are products of accomplishment, and this takes work, effort, suffering, determination. To rid the self may temporarily increase pleasure but it isn’t earned, it fades quickly as the novelty wears off. Experiencing the physical world and interacting with it generates contentedness because the pains of leaning are paid off in emotional reward and skillful actions. Thus, the theoretical notion of downloading knowledge is not a good idea because it robs us of experiencing life and the biological push to adapt and overcome.
2 Robert Rosen, Anticipatory Systems: Philosophical, Mathematical, and Methodological Foundations, 2nd ed., IFSR International Series on Systems Science and Engineering, 1 (New York: Springer, 2012), 4. On 208, Rosen discusses enzymes and molecules as an example and I am extrapolating to bodily sensations.
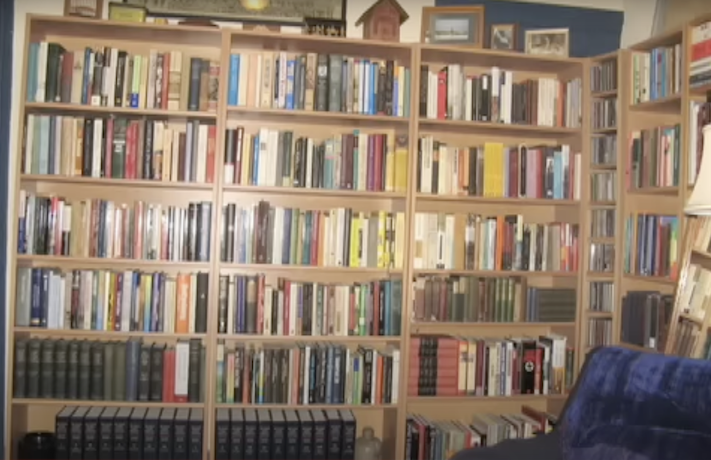
One of my favourite websites is etymonline.com because I find etymology useful for interpreting texts and understanding the intentions of the author(s). When I visited the site today, something caught my eye that I was not expecting to see: Doug and Mr. Plinkett
A connection between a character from YouTube and a website about etymology? How?
The bookshelf; how did RedLetterMedia get an image of Doug’s bookshelf? Doug is the creator of etymology.com and the blog post’s author, Talia, recognized it from video calling with him. She reached out to RLM on Patreon but has yet to hear back. If she does, I hope she provides us with an update.
I cropped the YouTube screenshot from the blog post and ran it through the reverse-image search function on both Google and Bing. Google only finds the original image from the blog post and Bing doesn’t even find that. Given the video was originally uploaded in 2009, this is to be expected, since even if Mike had source the image from a different website, it’s unlikely that this website and the image are still up today.
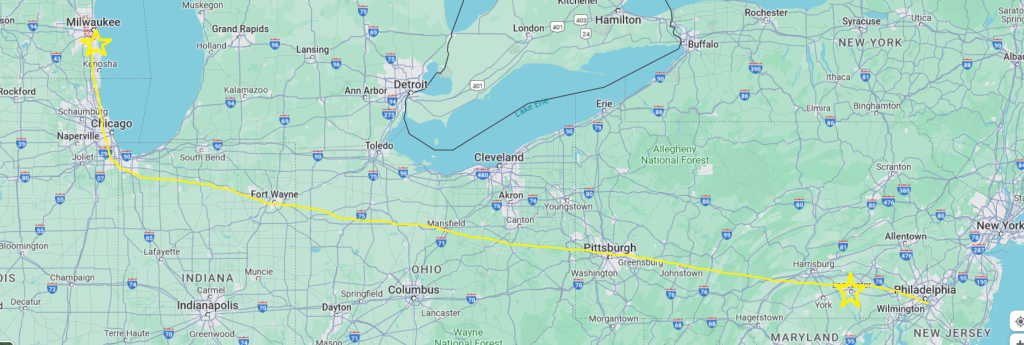
If we want to speculate further, one option is to think about whether they may know one another or have a mutual connection. According to Doug’s biography, he’s from southeastern Pennsylvania which is a fair distance from Milwaukee, so a personal connection is unlikely but is not impossible either. Did Mike have a video call with Doug at one point? Or did Rich or Jay source it through one of their connections? Do they even remember how the photo was found? We will have to see.
I like one comment by Sara posted at the bottom of the blog entry that reads “I’m a passionate fan of both Etymonline and Red Letter Media and this has made my day!” While I wouldn’t say that this discovery necessarily “made my day,” it is a humorous and unexpected moment. Especially considering I referenced one of their memes at the end of my qualia video.
Here, Rich is featured in a philosophy meme about Nihilism and Existentialism. This one did make my day when I found it on Reddit years ago. The silly text overlay at the top is my addition and is one of many Richisms that have developed over the years. There are several RLMemes that have emerged actually; they’ve been at it a long time and appeal to a particular demographic which grew up alongside the internet. Given I am a part of this demographic, I also love internet mysteries, so cheers to one more.
It wasn’t until recently that I realized I failed to add an important concept to the discussion on Rosen and the incompleteness of syntax. I’m actually quite annoyed and embarrassed by this because the idea was included in the presentation. It didn’t make it into the written version because I forgot about it and failed to reread the slides to see if anything was missing. If I had, I would have seen the examples and remembered to add it to the written piece.
In semantics, there are words with specific properties called indexicals. These words refer to things that are dependent on context, such as the time, place, or situation in which they are said.1 Some examples include:
this, that, those
I, you, they, he, she
today, yesterday, tomorrow, last year
here, there, then
Rosen would likely agree to the idea that indexicals are non-fractionable, where their function, or task they perform, cannot be isolated from the form in which they exist. The reason indexicals are non-fractionable is because they must be interpreted by a mind to know what someone is referring to. To accomplish this, sufficient knowledge or understanding of the current context is required, as without it, the statement remains ambiguous or meaningless. If I say “He is late” you must be able to discern who it is I am referring to.
Indexicals act like variables in a math equation: an input value must be provided to determine the output. In the case of language, the output is either true or false, and the input value is an implicit reference which requires another to make an inference about what the other has in mind. This inference is what establishes the connection between utterance and referent, only existing in the mind of another person rather than within the language system itself.
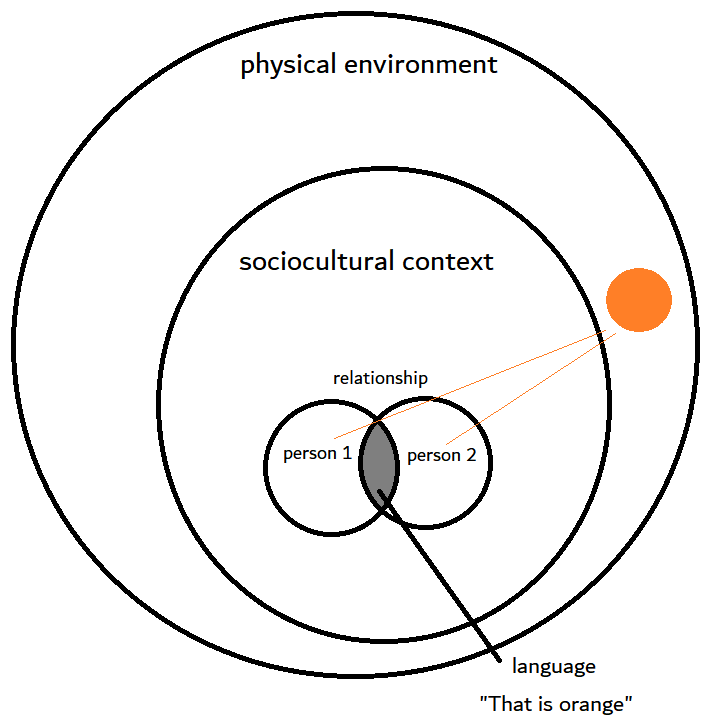
Thus, we are dealing with a few nested natural systems, from language, to body/mind, to interpersonal, to cultural and environmental. To evaluate a linguistic expression, however, one must know about the wider context in which they are in, traversing the systems both outward and inward. Perhaps a diagram will help:
Recall that in Anticipatory Systems, Rosen appeals to Gödel to demonstrate the limitations of formal systems. Particularly, formal systems cannot represent elements from natural systems which extend beyond the scope of its existing functionality; to do so requires further modelling from natural systems to formal systems. Therefore, any AI which uses computer code cannot infer beyond the scope of its programming, no matter how many connections are created, as some inferences require access to information which cannot be adequately represented by the system. Because language contains semantics, references to aspects of the world can be made by humans which cannot be interpreted by digital computer.
In an interesting series of events, I stumbled upon an author who also appeals to Gödel’s theorem to argue for the incompleteness of syntax with respect to semantics.2 In a book chapter titled Complementarity in Language, Lars Löfgren is interested in demonstrating how languages cannot be broken up into parts or components, and as such, must be considered as a process which entails both description and interpretation.3 On the other hand, artificial languages, which he also calls metalanguages, can be fragmented into components, however, they are still reliant on semantics to a degree. He states that in artificial languages, an inference acts as a production rule and is interpreted as a “real act of producing another sentence”4 which is presumably beyond the abilities of the formal system doing the interpreting. I say this because Löfgren finishes the section on Gödel abruptly without explaining this further, and goes on to discuss self-reference in mathematics. So with this in mind, let us return to the domain of minds and systems.
In language, self-reference can be generated through the use of indexicals such as ‘I’ or ‘my’ or ‘me’. When we investigate what exists at the end of this arrow, we find it points toward ourselves as a collection of perceptions, memories, thoughts, and other internal phenomena. The referent on the end of this arrow, however, isa subjective perspective. For an objective perspective of ourselves, we must be shown a reflected image ourselves from a new point of view. The information we require emerges from an independent observer, a mind with its own perspective. When we engage with this perspective, we become better able to understand what is otherwise imperceptible. Therefore, self-awareness is a problem for any system, not just formal systems as demonstrated in Gödel’s theorem, as it requires a view from outside to define the semantic information in question.
neuralblender.com
Works Cited
1 David Braun, ‘Indexicals’, in The Stanford Encyclopedia of Philosophy, ed. Edward N. Zalta, Summer 2017 (Metaphysics Research Lab, Stanford University, 2017), https://plato.stanford.edu/archives/sum2017/entries/indexicals/.
2 Lars Löfgren, ‘Complementarity in Language; Toward a General Understanding’, in Nature, Cognition and System II: Current Systems-Scientific Research on Natural and Cognitive Systems Volume 2: On Complementarity and Beyond, ed. Marc E. Carvallo, Theory and Decision Library (Dordrecht: Springer Netherlands, 1992), 131–32, https://doi.org/10.1007/978-94-011-2779-0_8.
What does it mean to call something an example of “artificial intelligence” (AI)? There are a few different ways to approach this question, one of which includes examining the field to identify an overarching definition or set of themes. Another involves considering the meanings of the words ‘artificial’ and ‘intelligence’, and arguably, doing so enables the expansion of this domain to include new approaches to AI. Ultimately, however, even if these agents one day exhibit sophisticated or intelligent behaviours, they nonetheless continue to exist as artifacts, or objects of creation.
The term artificial intelligence was conceived by computer scientist John McCarthy in 1958, and the purported reason he chose the term was to distinguish it from other domains of study.1 In particular, the field of cybernetics which involves analog ornon-digital forms of information processing, and automatatheory as a branch of mathematics which studies self-propelling operations.2 Since then, the term ‘artificial intelligence’ has been met with criticism, with some questioning whether it is an appropriate term for the domain. Specifically, Arthur Samuel was not in favour of its connotations, according to computer scientist Pamela McCorduck in her publication on the history of AI.3 She quotes Samuel as stating “The word artificial makes you think there’s something kind of phony about this, or else it sounds like it’s all artificial and there’s nothing real about this work at all.”4
Given the physical distinctions between computers and brains, it is clear that Samuel’s concerns are reasonable, as the “intelligence” exhibited by a computer is simply a mathematical model of biological intelligence. Biological systems, according to Robert Rosen, are anticipatory and thus capable of predicting changes in the environment, enabling individuals to tailor their behaviours to meet the demands of foreseeable outcomes.5 Because biological organisms depend on specific conditions for furthering chances of survival, they evolved ways to detect these changes in the environment and respond accordingly. As species evolved over time, their abilities to detect, process, and respond to information expanded as well, giving rise to intelligence as the capacity to respond appropriately to demanding or unfamiliar situations.6 Though we can simulate intelligence in machines, the use of the word ‘intelligence’ is metaphorical rather than literal. Thus, behaviours exhibit by computers is not real or literal ‘intelligence’ because it arises from an artifact rather than from biological outcomes.
An artifact is defined by Merriam-Webster as an object showing human workmanship or modification, as distinguished from objects found in nature.7 Etymologically, the root of ‘artificial’ is the Latin term artificialis or an object of art, where artificium refers to a work of craft or skill and artifex denotes a craftsman or artist.8 In this context, ‘art’ implies a general sense of creation and applicable to a range of activities including performances as well as material objects. The property of significance is its dependence on human action or intervention: “artifacts are objects intentionally made to serve a given purpose.”9 This is in contrast to unmodified objects found in nature, a distinction first identified by Aristotle in Metaphysics, Nicomachean Ethics, and Physics.10 To be an artifact, the object must satisfy three conditions: it is produced by a mind, involves the modification of materials, and is produced for a purpose. To be an artifact, an object or entity must meet all three criteria.
The first condition states the object must have been created by a mind, and scientific evidence suggests both humans and animals create artifacts.11 For example, beaver dams are considered artifacts because they block rivers to calm the water which creates ideal conditions for a building a lodge.12 Moreover, evidence suggests several early hominid species carved handaxes which serve social purposes as well as practical ones.13 By chipping away at a stone, individuals shape an edge into a blade which can be used for many purposes, including hunting and food preparation.14 Additionally, researchers have suggested that these handaxes may also have played a role in sexual selection, where a symmetrically-shaped handaxe demonstrating careful workmanship indicates a degree of physical or mental fitness.15 Thus, artifacts are important for animals as well as people, indicating the sophisticated abilities involved in the creation of artifacts is not unique to humans.
Computers and robots are also artifacts given that they are highly manufactured, functionally complex, and created for a specific purpose. Any machine or artifact which exhibits complex behaviour may appear to act intelligently, however, the use of ‘intelligent’ is necessarily metaphorical given the distinction between artifacts and living beings. There may one day exists lifelike machines which behave like humans, however, any claims surrounding literal intelligence must demonstrate how and why that is; the burden of proof is theirs to produce. An argument for how a man-made object sufficiently models biological processes is required, and even then, remains a simulation of real systems.
If the growing consensus in cognitive science indicates individuals and their minds are products of interactions between bodily processes, environmental factors, and sociocultural influences, then we should to adjust our approach to AI in response. For robots intending to replicate human physiology, a good first step would be to exchange neural networks made from software for ones built from electrical circuits. The Haikonen Associative Neuron offers a solution to this suggestion,16 and when coupled with the Haikonen Cognitive Architecture, is capable of generating the required physiologicalprocesses for learning about the environment.17 Several videos uploaded to YouTube demonstrate a working prototype of a robot built on these principles, where XCR-1 is able to learn associations between stimuli in its environment, similarly to humans and animals.18 Not only is it a better model of animal physiology than robots relying on computer software, the robot is capable of performing a range of cognitive tasks, including inner speech,19 inner imagery,20 and recognizing itself in a mirror.21
So, it seems that some of Arthur Samuel’s fears have been realized, considering machines merely simulate behaviours and processes identifiable in humans and animals. Moreover, the use of ‘intelligence’ is metaphorical at best, as only biological organisms can display true intelligence. If an aspect of Samuel’s concerns related to securing funding within his niche field of study, and its potential to fall out of fashion, he has no reason to worry. Unfortunately, Samuel passed away in 199022 so he would not have had a chance to see the monstrosity that AI has since become.
Even if these new machines were to become capable of sophisticated behaviours, they will always exist as artifacts, objects of human creation and designed for a specific purpose. The etymological root of the word ‘artificial’ alone provides sufficient grounds for classifying these robots and AIs as objects, however, as they continue to improve, this might become difficult to remember at times. To avoid being deceived by these “phony” behaviours, it will become increasingly important to understand what these intelligent machines are capable of and what they are not.
neuralblender.com
Works Cited
1 Nils J. Nilsson, The Quest for Artificial Intelligence (Cambridge: Cambridge University Press, 2013), 53, https://doi.org/10.1017/CBO9780511819346.
4 Pamela McCorduck, Machines Who Think: A Personal Inquiry Into the History and Prospects of Artificial Intelligence, [2nd ed.] (Natick, Massachusetts: AK Peters, 2004), 97; Nilsson, The Quest for Artificial Intelligence, 53.
5 Robert Rosen, Anticipatory Systems: Philosophical, Mathematical, and Methodological Foundations, 2nd ed., IFSR International Series on Systems Science and Engineering, 1 (New York: Springer, 2012), 7.
6 ‘Intelligence’, in Merriam-Webster.Com Dictionary (Merriam-Webster), accessed 5 March 2024, https://www.merriam-webster.com/dictionary/intelligence.
7 ‘Artifact’, in Merriam-Webster.Com Dictionary (Merriam-Webster), accessed 17 October 2023, https://www.merriam-webster.com/dictionary/artifact.
8 Douglas Harper, ‘Etymology of Artificial’, in Online Etymology Dictionary, accessed 14 October 2023, https://www.etymonline.com/word/artificial; ‘Artifact’.
9 Lynne Rudder Baker, ‘The Ontology of Artifacts’, Philosophical Explorations 7, no. 2 (1 June 2004): 99, https://doi.org/10.1080/13869790410001694462.
10 Beth Preston, ‘Artifact’, in The Stanford Encyclopedia of Philosophy, ed. Edward N. Zalta and Uri Nodelman, Winter 2022 (Metaphysics Research Lab, Stanford University, 2022), https://plato.stanford.edu/archives/win2022/entries/artifact/.
11 James L. Gould, ‘Animal Artifacts’, in Creations of the Mind: Theories of Artifacts and Their Representation, ed. Eric Margolis and Stephen Laurence (Oxford, UK: Oxford University Press, 2007), 249.
13 Steven Mithen, ‘Creations of Pre-Modern Human Minds: Stone Tool Manufacture and Use by Homo Habilis, Heidelbergensis, and Neanderthalensis’, in Creations of the Mind: Theories of Artifacts and Their Representation, ed. Eric Margolis and Stephen Laurence (Oxford, UK: Oxford University Press, 2007), 298.
16 Pentti O Haikonen, Robot Brains: Circuits and Systems for Conscious Machines (John Wiley & Sons, 2007), 19.
17 Pentti O Haikonen, Consciousness and Robot Sentience, 2nd ed., vol. 04, Series on Machine Consciousness (WORLD SCIENTIFIC, 2019), 167, https://doi.org/10.1142/11404.
18 ‘Pentti Haikonen’, YouTube, accessed 6 March 2024, https://www.youtube.com/@PenHaiko.
19 Haikonen, Consciousness and Robot Sentience, 182.
21Robot Self-Consciousness. XCR-1 Passes the Mirror Test, 2020, https://www.youtube.com/watch?v= WE9QsQqsAdo.
22 John McCarthy and Edward A. Feigenbaum, ‘In Memoriam: Arthur Samuel: Pioneer in Machine Learning’, AI Magazine 11, no. 3 (15 September 1990): 10, https://doi.org/10.1609/aimag.v11i3.840.
I learned about the Schiaparelli Baby from a video created by a channel I follow, and I wanted to mention it here because it’s funny and makes me think of a bedazzled iCub. I especially appreciate the use of electronics hardware with Swarovski crystals1 but am sceptical about whether it’s really a robot2 or just a doll that looks like a robot. I was hoping it was a real robot because I want to see it walk, it would probably cross the weirdness threshold into uncanny valley territory.
Although it could be argued that the baby serves as a depressing commentary on modern families in consumerist societies, the dress, on the other hand, is less of a tragic metaphor and more of a gaudy item of clothing. It’s commentary doesn’t explicitly discuss the deterioration of social relations Even then, the chaotic glam-tech maximalism really resonates with me, but if I were to wear it, I would replace the collarbone phone for a Nokia 3310.
Sarah Mower, ‘Schiaparelli Spring 2024 Couture Collection’, Vogue (blog), 22 January 2024, https://www.vogue.com/fashion-shows/spring-2024-couture/schiaparelli.
Elizabeth Paton, ‘The Hot New Accessory From the Paris Runways: A Robot Baby’, The New York Times, 22 January 2024, sec. Style, https://www.nytimes.com/2024/01/22/style/robot-baby-schiaparelli-show.html.













{kind=link}